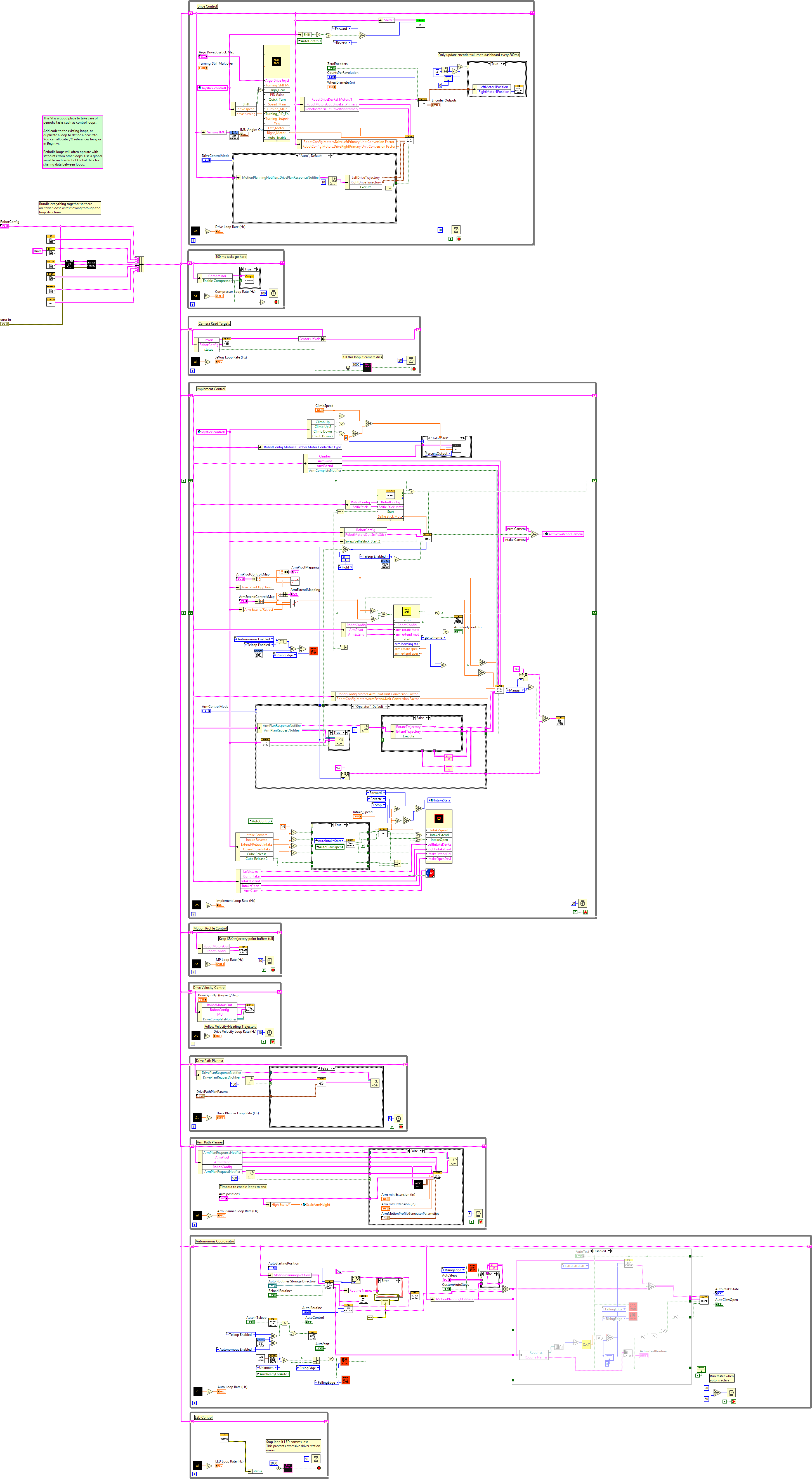
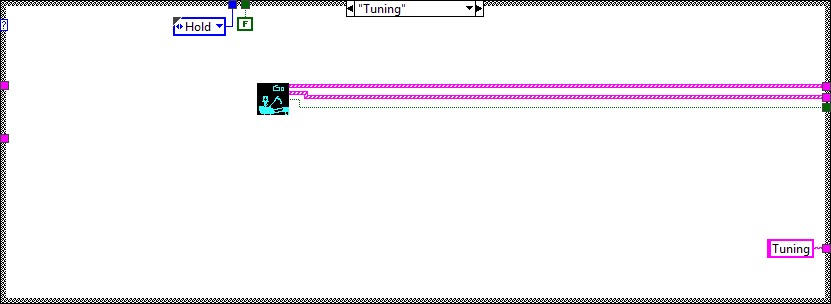
This VI runs in parallel to other tasks. It can contain as many user-defined periodic loops as you need. These can carry out PID or other sorts of timed response.
|
|
error in error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
RobotConfig |
|
|
Motors |
|
|
DriveLeftPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveLeftSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
RightIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
LeftIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmExtend |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot2 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Climber |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Selfie Stick |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Sensors |
|
|
IMU |
|
|
Yaw Axis |
|
|
SPI Chip Select |
|
|
AHRS Algorithm |
|
|
Calibration Time (s) |
|
|
Calibrate On Open |
|
|
LimitSwitch1 |
|
|
DIO Channel |
|
|
Active Low |
|
|
LimitSwitch2 |
|
|
DIO Channel |
|
|
Active Low |
|
|
BeamBreak |
|
|
DIO Channel |
|
|
Active Low |
|
|
JeVois |
|
|
Baud Rate Baud Rate specifies the rate of transmission. The default is 9600. |
|
|
Parity Parity specifies the parity type to use for the parity bit of each data character you want to transmit or receive. |
|
|
Data Bits Data Bits specifies the number of bits in each data character. The value of data bits is between five and eight. The default value is 8. |
|
|
Stop Bits Stop Bits specifies the number of stop bits that indicate the end of a data character. |
|
|
Termination Char (0xA = '\n' = LF) Termination Char (0xA = '\n' = LF) specifies a character that terminates the read operation. The default is 0xA, which specifies a line feed character. |
|
|
Enable Termination Char? (T) Enable Termination Char? (T) specifies, when TRUE, that the serial device terminates a read operation when it reads the Termination Char. The default is TRUE. |
|
|
Flow Control Flow Control specifies the type of control used by the transfer mechanism. |
|
|
Timeout Value (ms) Timeout Value (ms) specifies the minimum timeout value, in milliseconds, to use for the write and read operations. The default is 5000. |
|
|
Serial Port Serial Port specifies whether to use the Onboard or MXP serial port. |
|
|
PID |
|
|
ArmExtend |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmRotate |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Drive |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
DriveGyro Kp ((in/sec)/deg) |
|
|
CameraPole |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Solenoids |
|
|
ArmClaw |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeExtend |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeOpen |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
Shifter |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
RobotDimensions |
|
|
Length |
|
|
Height |
|
|
HeightOfBumpers |
|
|
DistanceFromFrameEdgeToPyramid |
|
|
HeightOfFrameToIntake |
|
|
EdgeOfFrameToOrigin |
|
|
ArmHomePosition |
|
|
Angle (rad) |
|
|
Radius (in) |
|
|
SelfieStickParams |
|
|
Home Height (in) |
|
|
CruiseVelocity |
|
|
MaxAccel |
|
|
Low Height (in) |
|
|
High Height (in) |
|
|
Mid Height (in) |
|
|
Enable Compressor |
|
|
ZeroEncoders |
|
|
CountsPerRevolution |
|
|
WheelDiameter(in) |
|
|
Argo Drive Joystick Map |
|
|
Auto Speed |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
Low Speed |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
Auto Turning |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
Low Turning |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
High Speed |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
High Turning |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
Intake_Speed |
|
|
ArmControlMode |
|
|
Arm positions |
|
|
Hold |
|
|
X |
|
|
Y |
|
|
High Scale |
|
|
X |
|
|
Y |
|
|
Low Scale |
|
|
X |
|
|
Y |
|
|
Switch |
|
|
X |
|
|
Y |
|
|
Climb |
|
|
X |
|
|
Y |
|
|
Back Place |
|
|
X |
|
|
Y |
|
|
Arm min Extension (in) |
|
|
Arm max Extension (in) |
|
|
ArmMotionProfileGeneratorParameters |
|
|
Trajectory Point Interval (ms) |
|
|
Maximum Travel Speed (units/s) |
|
|
Velocity Ramp Time (ms) |
|
|
Acceleration Ramp Time (ms) |
|
|
ArmPivotControlsMap |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
ArmExtendControlsMap |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
ClimbSpeed |
|
|
DriveControlMode |
|
|
Turning_Still_Multiplier |
|
|
DriveGyro Kp ((in/sec)/deg) |
|
|
DrivePathPlanParams |
|
|
max_velocity (in/s) double |
|
|
max_acceleration (in/s^2) double |
|
|
max_jerk (in/s^3) double |
|
|
dt(ms) double |
|
|
sample_count int |
|
|
wheelbase_width (in) double |
|
|
AutoSteps |
|
|
Cluster |
|
|
Waypoint Type |
|
|
Waypoint |
|
|
x double |
|
|
y double |
|
|
angle double |
|
|
WaitTime (ms) |
|
|
ArmPosition |
|
|
IntakeState |
|
|
Claw Open |
|
|
ArmOffsetTime (ms) |
|
|
ClawReleaseTime (ms) |
|
|
AutoStart |
|
|
AutoInTeleop |
|
|
CustomAutoSteps |
|
|
AutoStartingPosition |
|
|
Auto Routine |
|
|
Auto Routines Storage Directory |
|
|
Reload Routines |
|
|
AutoTest |
|
|
Encoder Outputs |
|
|
LeftMotor1Velocity |
|
|
LeftMotor1Position |
|
|
RightMotor1Velocity |
|
|
RightMotor1Position |
|
|
LeftMotor2Position |
|
|
LeftMotor2Velocity |
|
|
RightMotor2Position |
|
|
RightMotor2Velocity |
|
|
ArmPivotMapping |
|
|
ArmExtendMapping |
|
|
Drive Loop Rate (Hz) |
|
|
Compressor Loop Rate (Hz) |
|
|
JeVois Loop Rate (Hz) |
|
|
Implement Loop Rate (Hz) |
|
|
MP Loop Rate (Hz) |
|
|
Drive Planner Loop Rate (Hz) |
|
|
Arm Planner Loop Rate (Hz) |
|
|
Drive Velocity Loop Rate (Hz) |
|
|
IMU Angles Out |
|
|
X Angle |
|
|
Y Angle |
|
|
Z Angle |
|
|
Auto Loop Rate (Hz) |
|
|
AutoClawOpen |
|
|
AutoIntakeState |
|
|
LED Loop Rate (Hz) |
|
|
ArmReadyForAuto |
|
|
AutoControl |
|
|
ActiveTestRoutine |






"Periodic Tasks.vi History"
Current Revision: 213